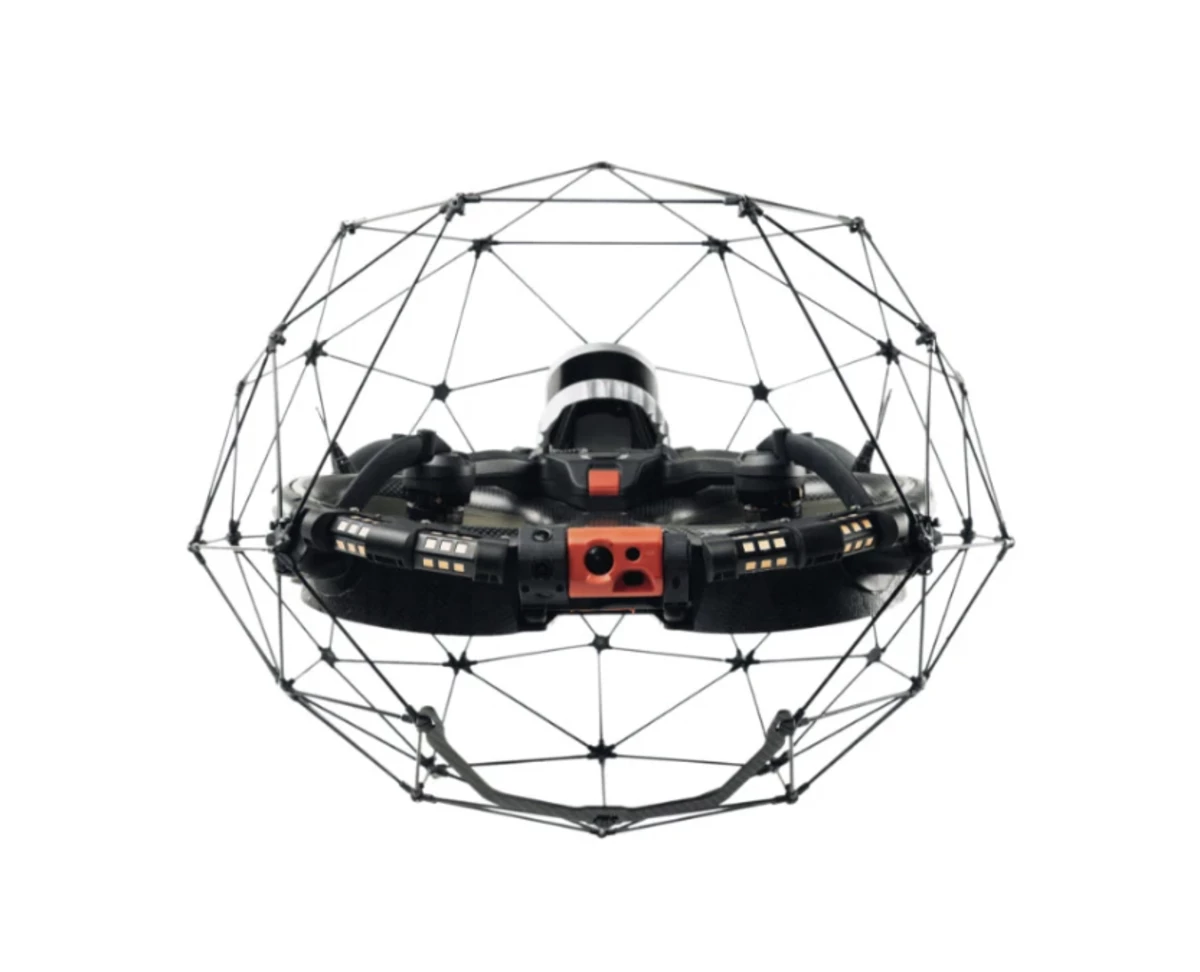
Actualités autour du ELIOS 3 SURVEYING PAYLOAD :
a ajouté un article où est cité ELIOS 3 SURVEYING PAYLOAD

a partagé une réalisation
avec :
a ajouté un article où est cité ELIOS 3 SURVEYING PAYLOAD
a ajouté un article où est cité ELIOS 3 SURVEYING PAYLOAD
a ajouté une actualité où il cite :
a ajouté un article où est cité ELIOS 3 SURVEYING PAYLOAD
a ajouté une actualité où il cite :